
Jellyfish V2 is UBCO Aerospace’s student-built drone, designed to compete in the 2025 Aerial Evolution Association of Canada (AEAC) Student UAS Competition. This national competition challenges university teams to design, build, and fly drones capable of supporting wildfire detection and response.
Why We Built Jellyfish V2
After Canada’s record-breaking wildfire season in 2023, the AEAC created a competition where students design drones to help detect fires early and deliver water to hotspots.
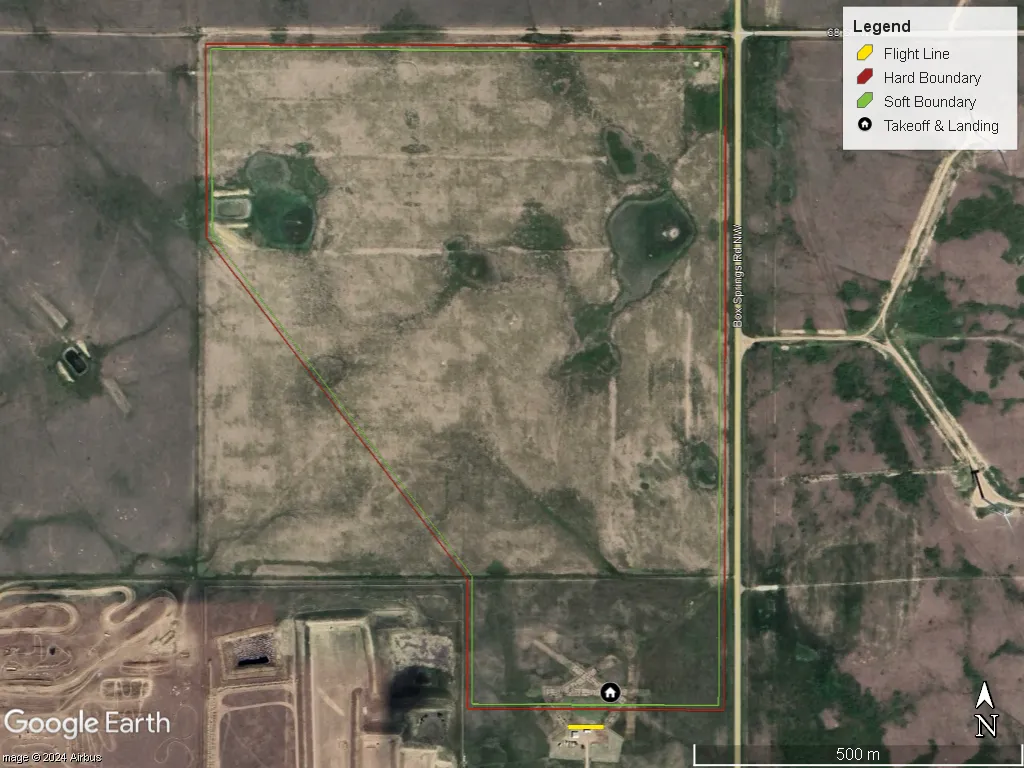
Competition site at Medicine Hat, Alberta — where the 2025 AEAC Student UAS Competition was held.
The Competition Tasks
The AEAC competition required teams to complete two missions:
-
Hotspot Detection and Mapping
- Find simulated wildfire “hotspots” (infrared beacons).
- Identify the cause of the fire.
- Submit a digital map (KML file).
-
Water Transport
- Pick up water from a large tank.
- Drop it into smaller target buckets across the field.
- Deliver as much water as possible, as evenly as possible.
The Drone: Jellyfish V2
Jellyfish V2 was designed from the ground up to meet these wildfire challenges.

Integrated water tank and hose assembly used for Task 2.
- Aircraft Design: Carbon fiber quadcopter frame.
- Motors & Power: MN8012 Antigravity motors + dual 27Ah Li-ion batteries for 30+ minutes of flight.
- Payload:
- Hotspot Detection: Infrared camera with custom filter + onboard AI.
- Water Transport: Cylindrical baffled tank with dual pumps and solenoid valves.
- Autonomy: Capable of automated takeoff, mapping, and water drops — with manual override for safety.
Performance at the 2025 AEAC Competition
Task 1 – Hotspot Detection

Preperation of the drone prior to take-off for Task 1.
Jellyfish began its autonomous search but faced camera and telemetry issues. Midway, a motor controller (ESC) failure forced an emergency landing.
Task 2 – Water Transport

Custom baffled water tank stabilized against sloshing during flight.
In Task 2, Jellyfish successfully pumped and carried water. Strong prairie winds and connectivity issues required manual intervention, but the tank and pump system validated well under real-world conditions.
What We Learned
- Reliability is key: A single solder fault caused a mission-ending ESC failure.
- Autonomy under pressure: Our AI and pumping systems worked in testing but struggled in competition.
- Weather resilience: Tank baffles and vibration dampers helped keep Jellyfish stable in high winds.
Looking Ahead
Future work will focus on:
- More robust electronics and redundancy.
- Improved real-time hotspot detection.
- Greater autonomy in water pickup and delivery.
About the Team
The UBCO Aerospace is a student-run group developing drones and aerospace tech. Competitions like AEAC allow us to test designs against real-world wildfire challenges.